Abstract
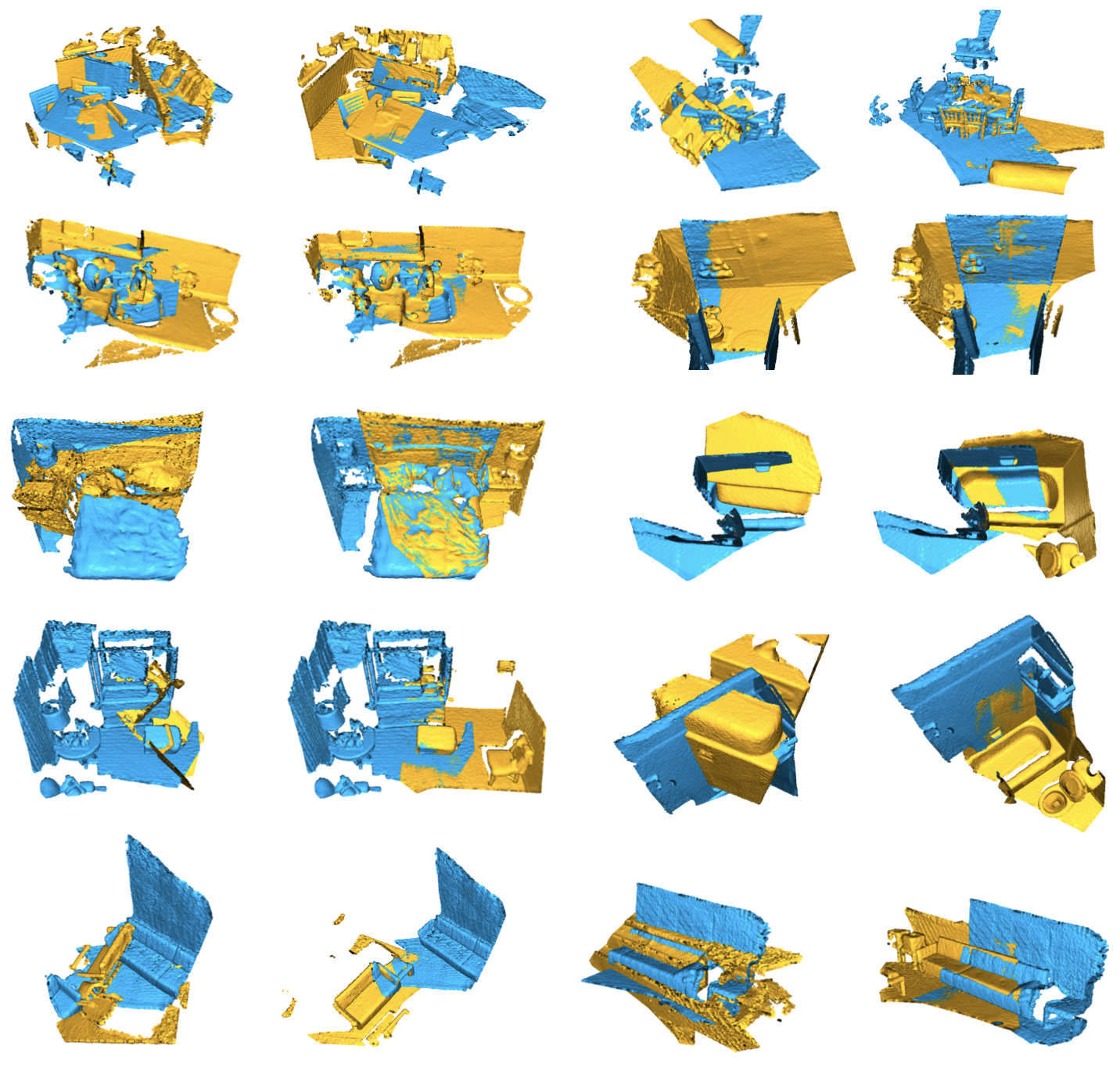
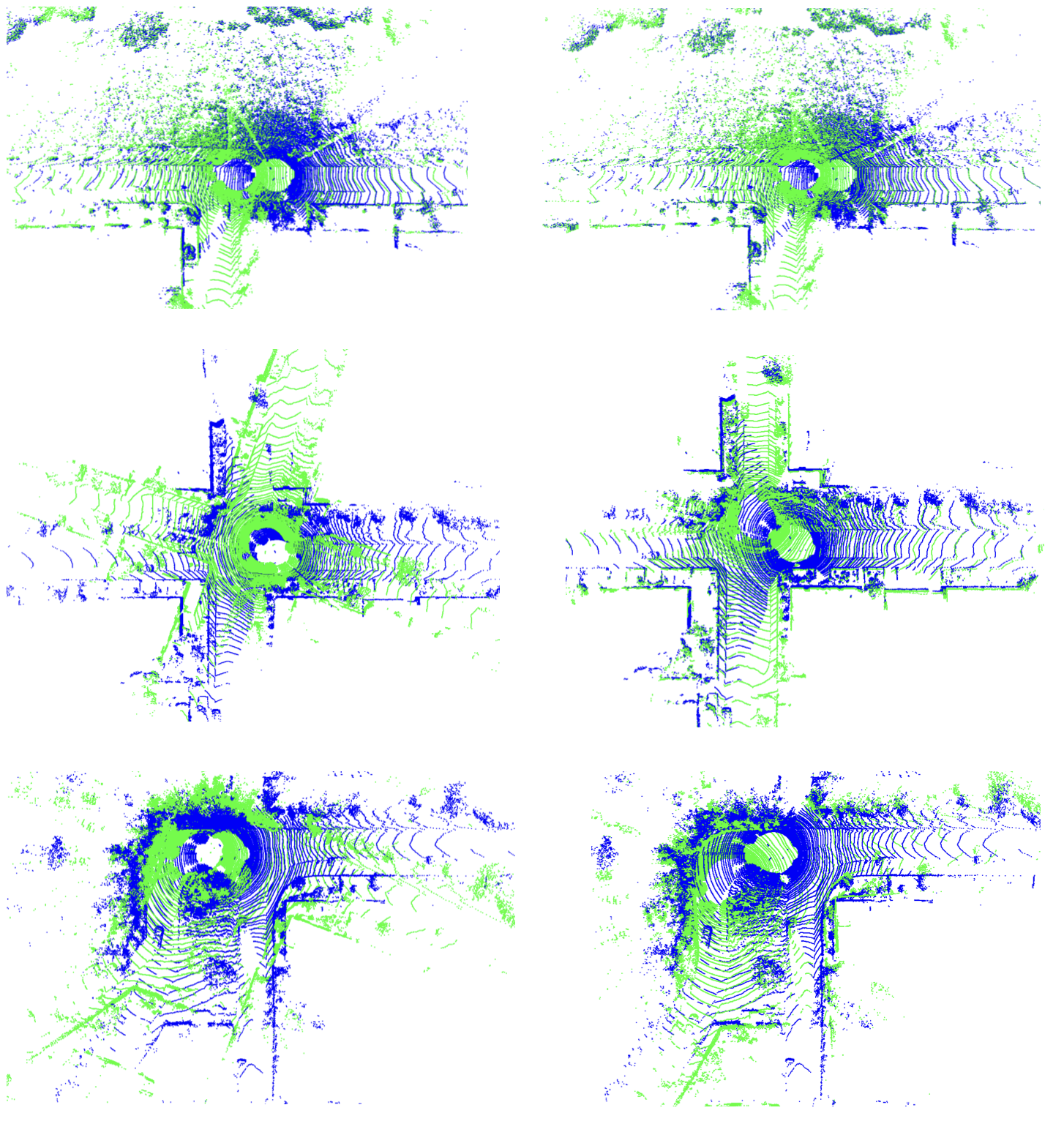
Point cloud registration is the task of estimating the rigid transformation that aligns a
pair of point cloud fragments. We present an efficient and robust framework for pairwise
registration of real-world 3D scans, leveraging Hough voting in the 6D transformation
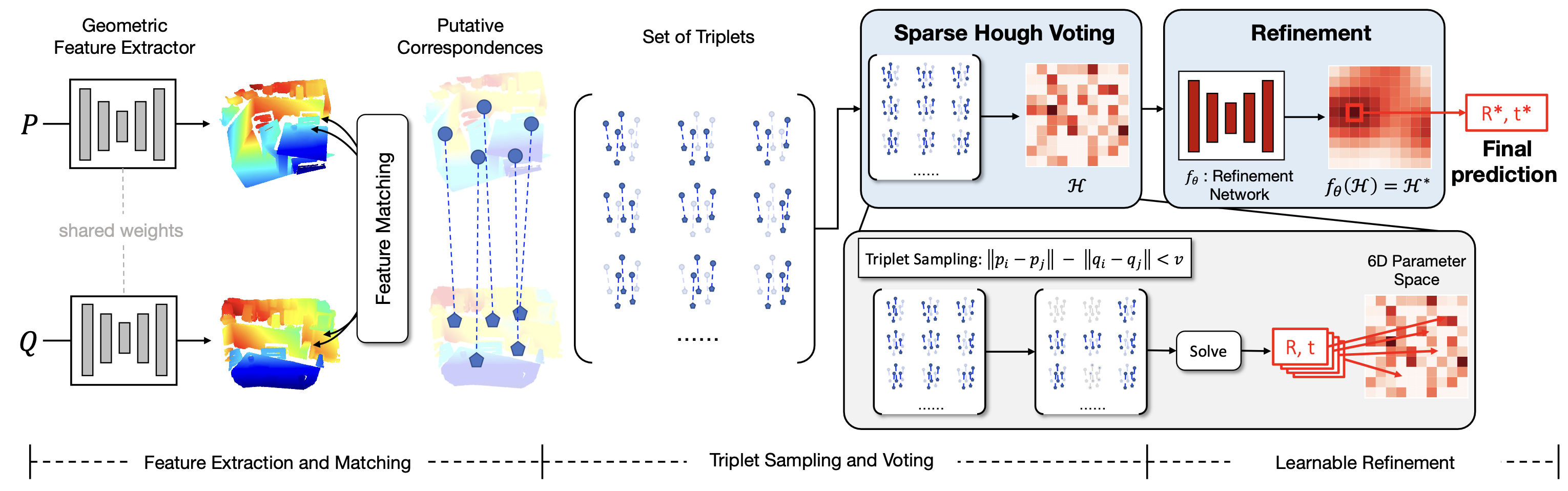
parameter space. First, deep geometric features are extracted from a point cloud pair to
compute putative correspondences. We then construct a set of triplets of correspondences
to cast votes on the 6D Hough space, which represents the transformation parameters in the
form of sparse tensors. Next, a fully convolutional refinement module is applied to refine
the noisy votes. Finally, we identify the consensus among the correspondences from the
Hough space, which we use to predict our final transformation parameters. Our method
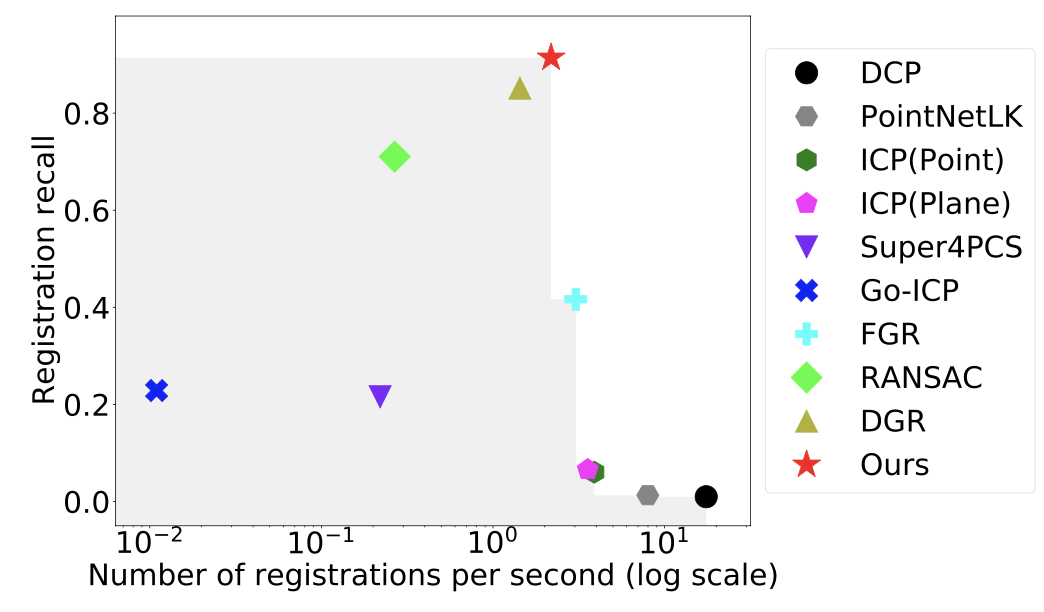
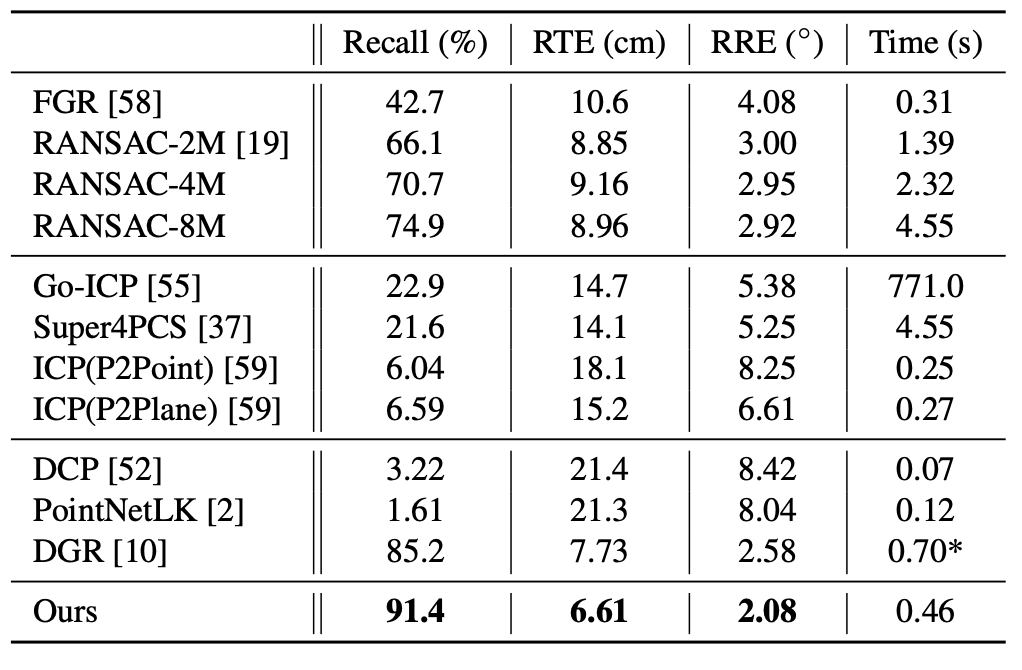
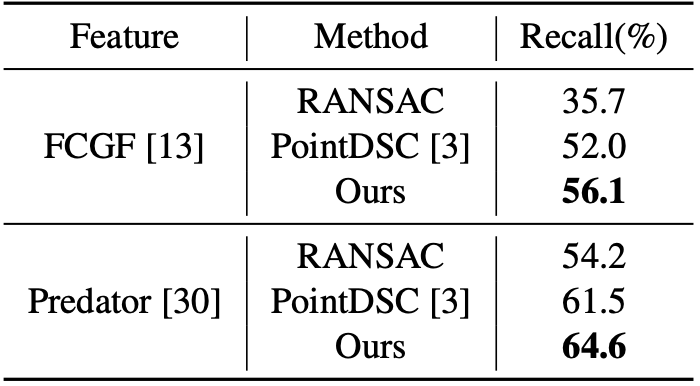
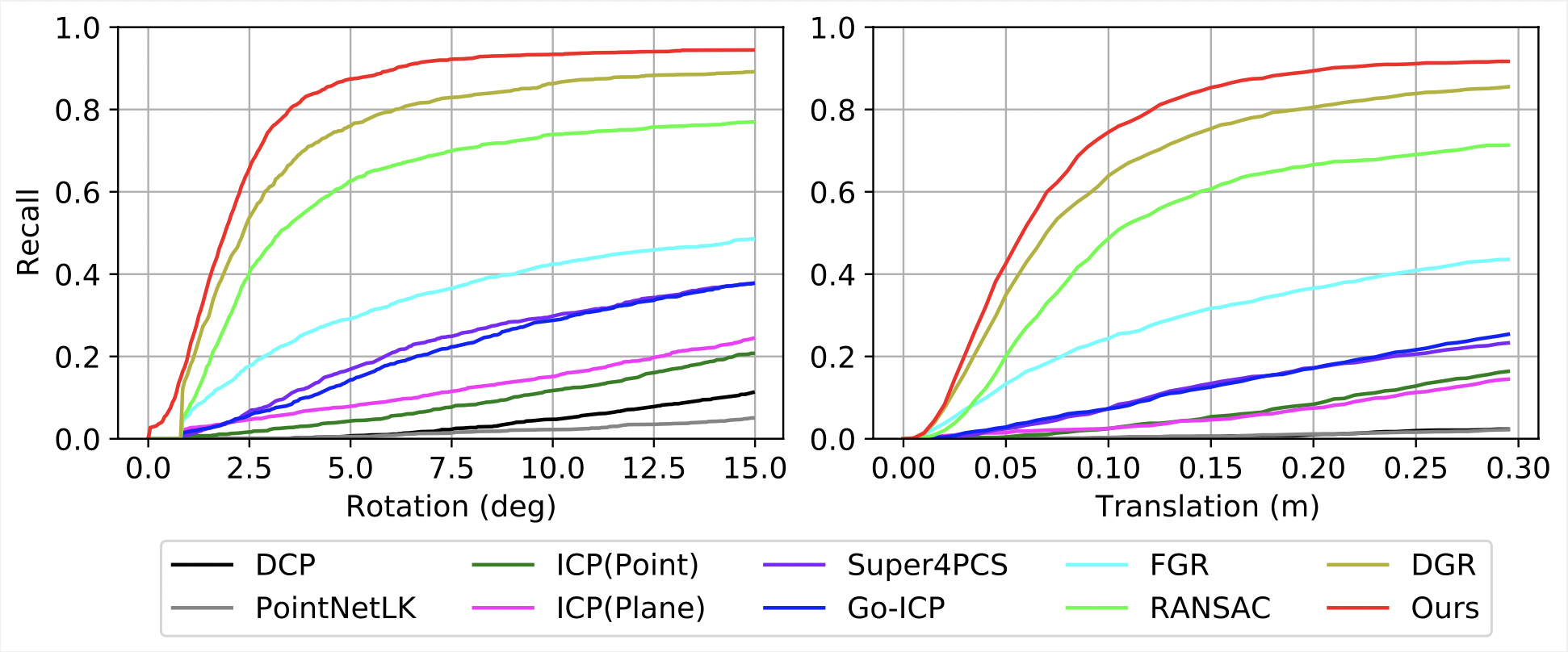
outperforms state-of-the-art methods on the 3DMatch and 3DLoMatch benchmarks, while
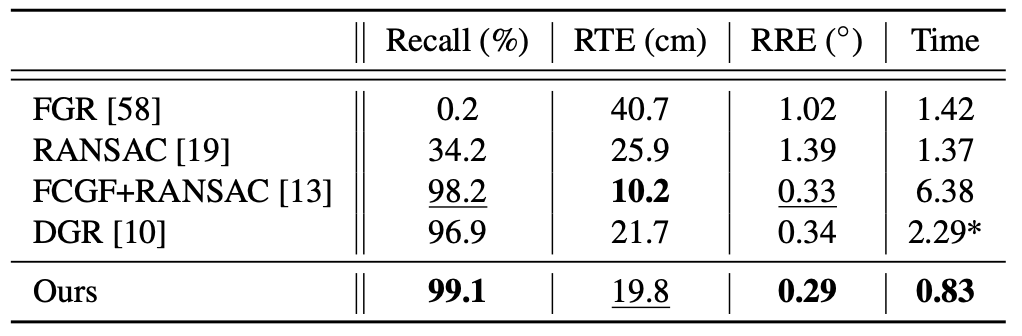
achieving comparable performance on the KITTI odometry dataset. We further demonstrate the
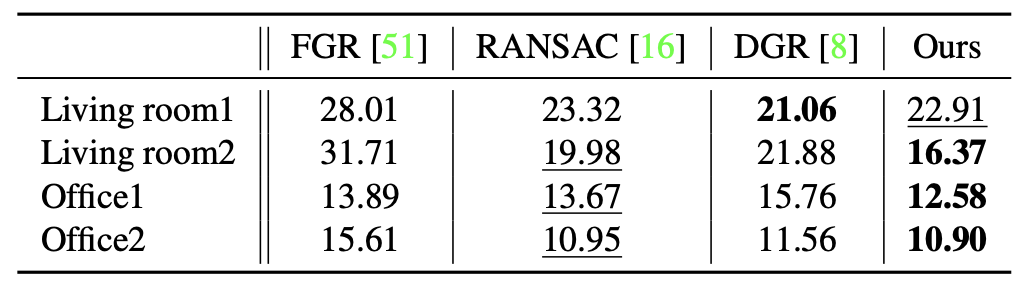
generalizability of our approach by setting a new state of the art on the ICL-NUIM
dataset, where we integrate our module into a multi-way registration pipeline.